https://deepflowest.tistory.com/223
https://hub.docker.com/r/ufoym/deepo#Usage
https://docs.docker.com/engine/install/ubuntu/
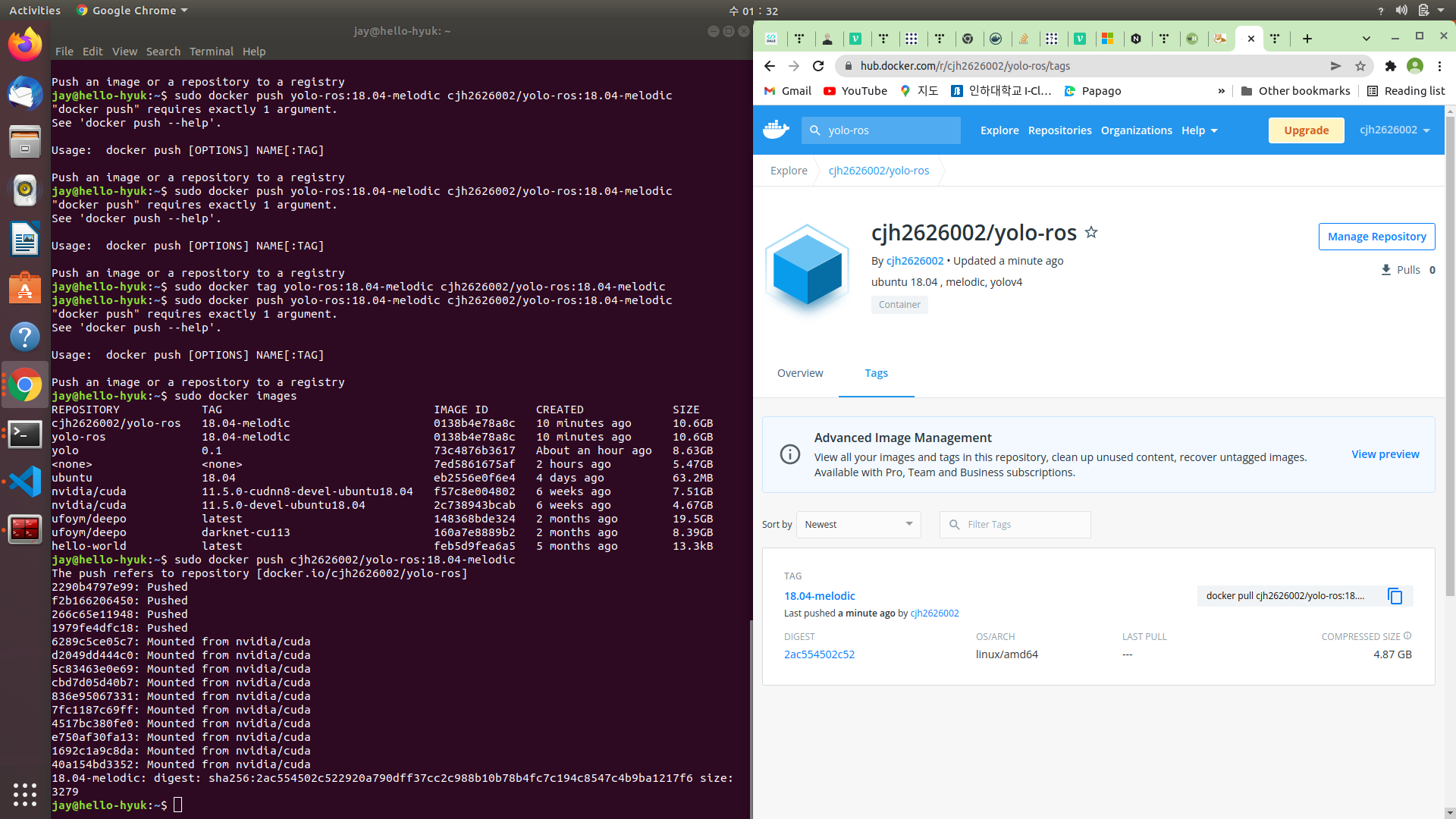
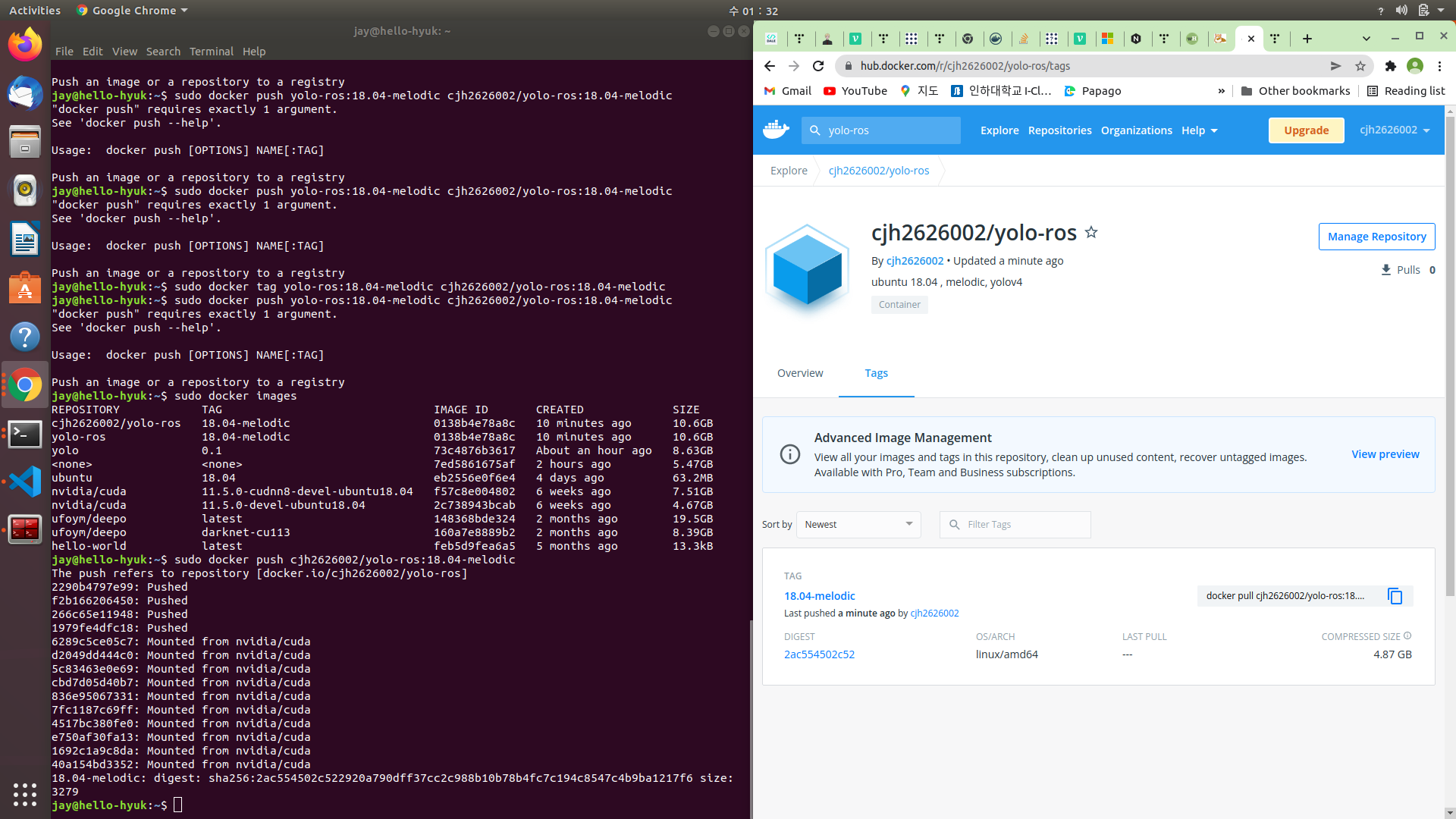
https://hub.docker.com/r/cjh2626002/yolo-ros/tags
darknet test
# sudo docker run -it -e DISPLAY=$DISPLAY -v /tmp/.X11-unix/:/tmp/.X11-unix/ --gpus all cjh2626002/yolo-ros:18.04-melodic ./darknet detect cfg/yolov4.cfg yolov4.weights data/dog.jpg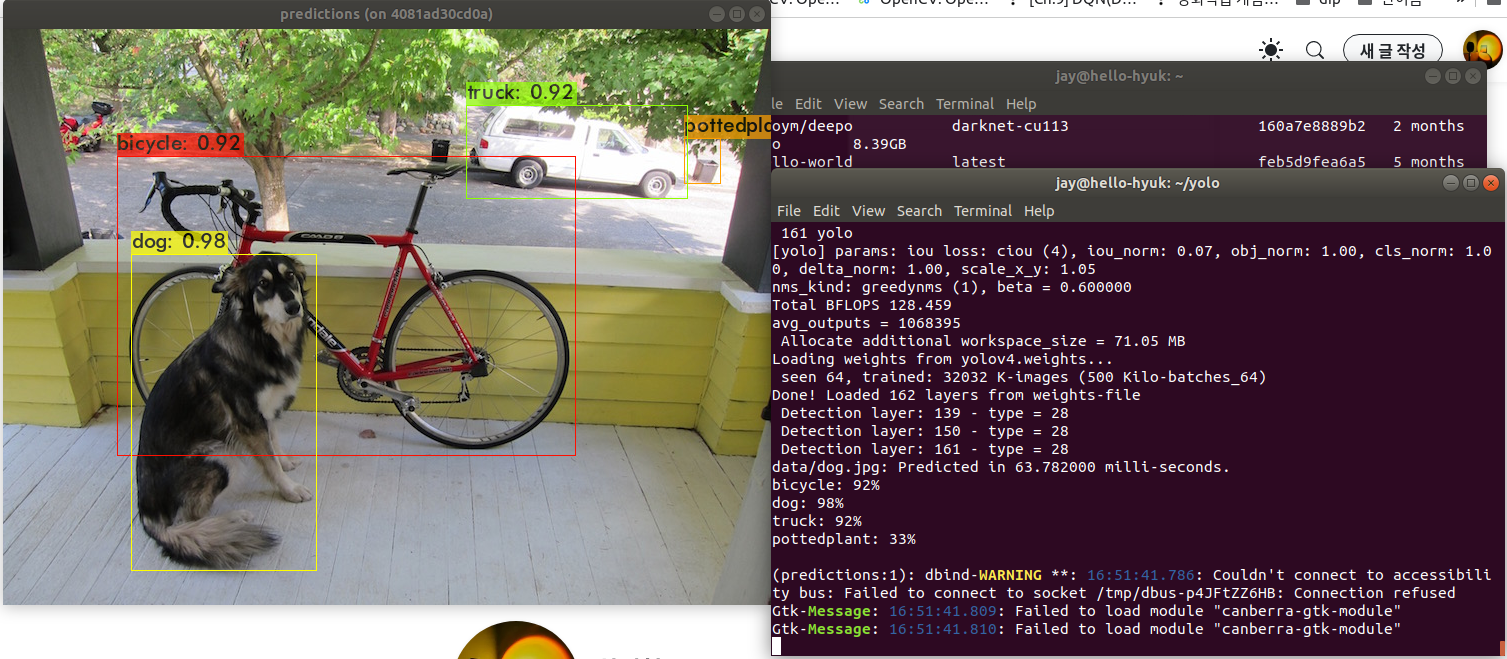
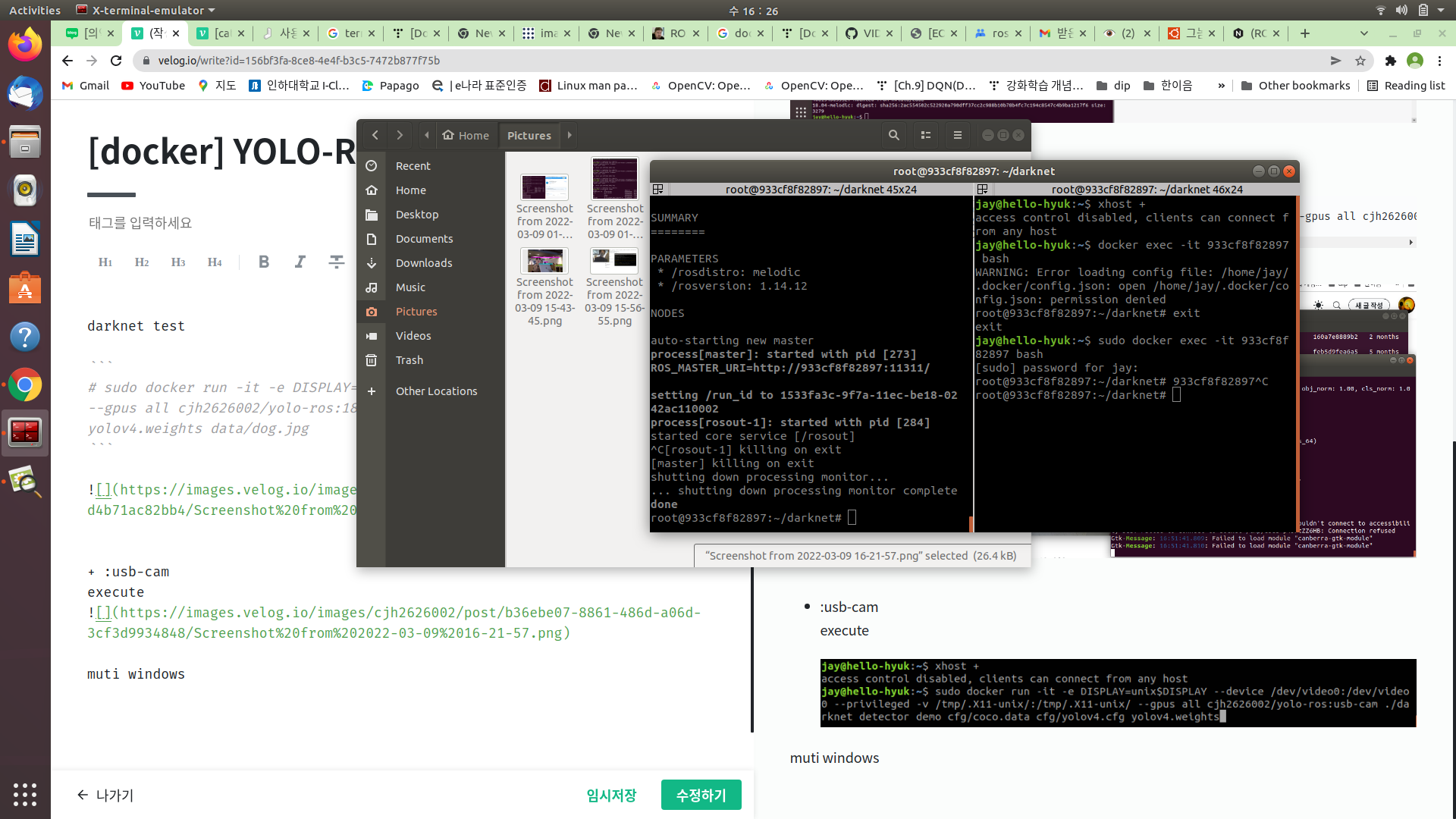
- :usb-cam
execute

# xhost +
# sudo docker run -it -e DISPLAY=unix$DISPLAY --device /dev/video0:/dev/video0 --privileged -v /tmp/.X11-unix/:/tmp/.X11-unix/ --gpus all cjh2626002/yolo-ros:usb-cammuti terminal
sudo docker ps -> get container ID

execute container
# xhost +
# sudo docker exec -it <container_id> bashtensorrt
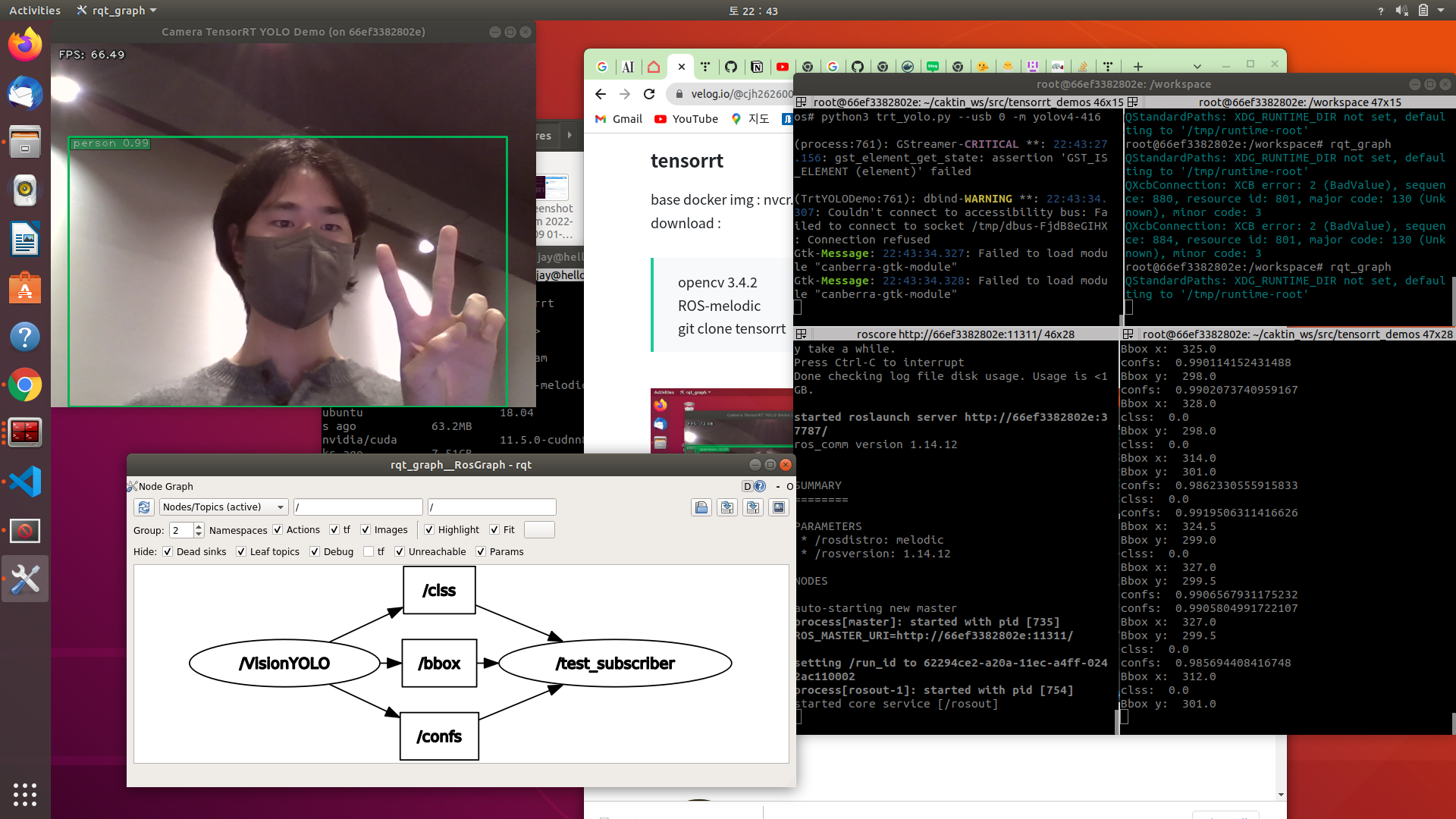
base docker img : nvcr.io/nvidia/tensorrt:20.11-py3
download :
opencv 3.4.2
ROS-melodic
git clone tensorrt
Autonomous driving vision