ROS 설치
📌 ROS (Robot Operating System)
ROS는 운영체제에서 실행되는 로봇 응용 프로그램 개발에 필요한 도구, 라이브러리 및 규격을 제공
1. 가상 머신 설치
윈도우 운영체제에서 ROS를 실행하려면 가상머신(Virtual Machine)을 사용하거나, WSL(Windows Subsystem for Linux)을 사용할 수 있습니다. 가상머신을 사용한다면, VirtualBox나 VMWare와 같은 프로그램을 사용하여 리눅스 운영체제를 설치하고 ROS를 설치하면 됩니다. WSL을 사용한다면, Windows에서 리눅스 환경을 실행하여 ROS를 설치하면 됩니다.
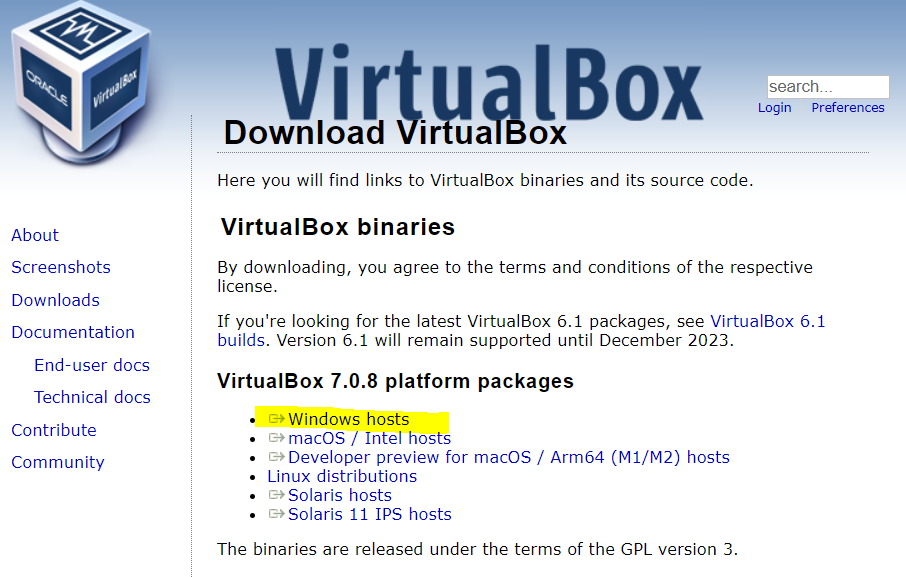
1-1. Oracle VM VirtualBox 설치
다운로드 링크
운영체제에 맞는 설치파일을 다운로드하고 설치
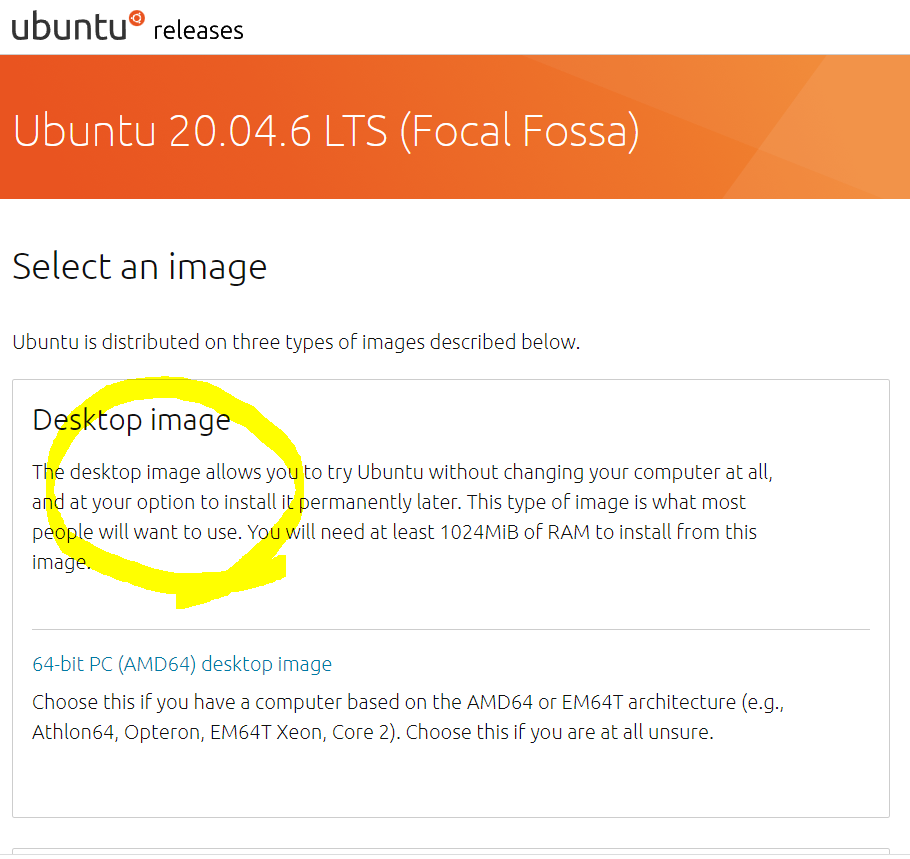
1-2. Ubuntu 다운로드
다운로드 링크
Ubuntu OS 다운로드
1-3. 가상머신 만들기
VirtualBox를 실행하고 새 가상머신을 만듭니다. 이름과 운영체제를 설정하고, 메모리 크기를 할당합니다. Ubuntu를 설치할 ISO 이미지 파일을 선택합니다.
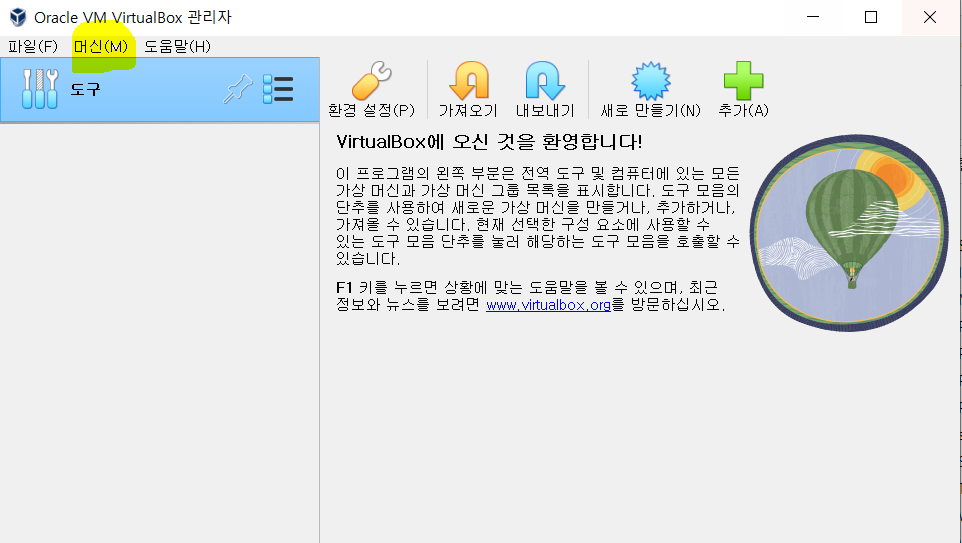
🔧 좌측 상단 머신 ➡ 새로 만들기
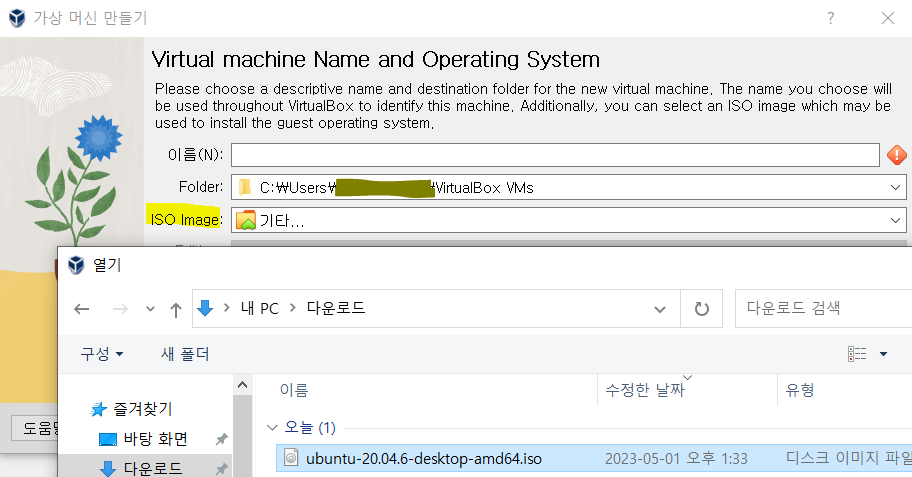
🔧 ISO Image ➡ 다운받은 Ubuntu 이미지 선택 (이름은 원하는 걸로: 나는 Ubuntu-20.04.6 로 설정) ➡ 다음

🔧 메모리 크기 정하기: 일단 기본 값으로 두고 패스
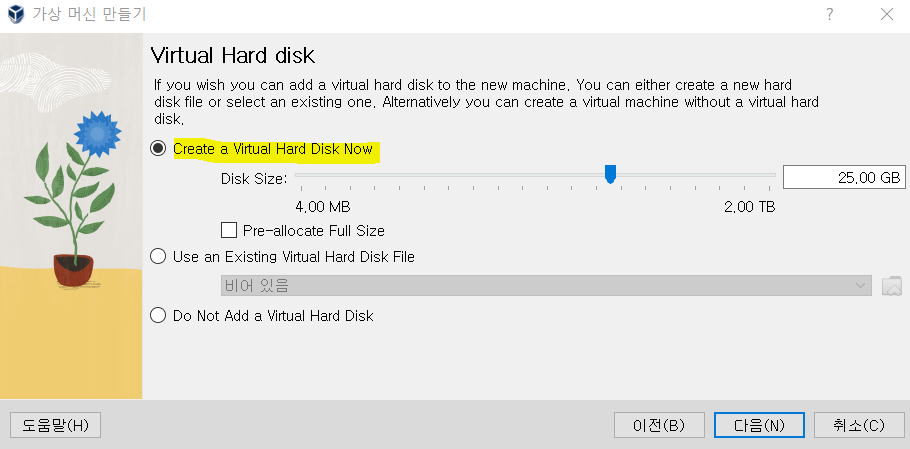
🔧 가상 디스크 공간이 되는 파일 만들기: 새로 만들기 때문에 create a virtual hard disk now 선택
👊 우분투 OS 설치 준비 완료
👊 다운받은 ISO 파일 VMmachine에 추가해서 OS 설치하기
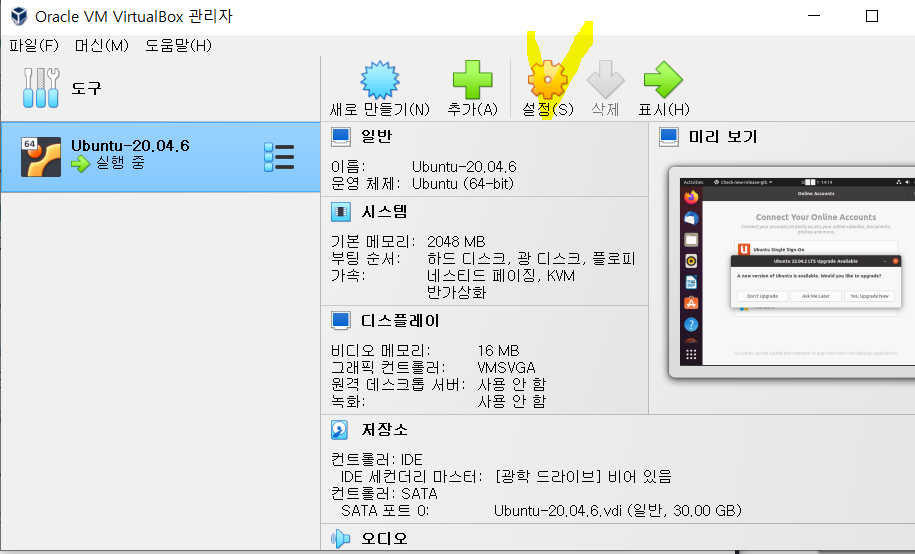
🔧 방금 만든 가상 머신 선택 ➡ 설정 버튼 클릭
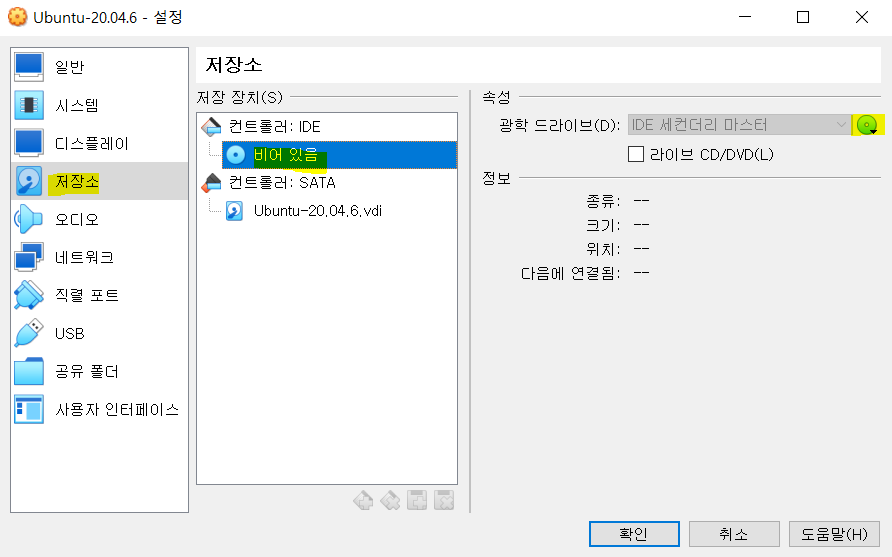
🔧 좌측저장소 클릭 ➡ 커트롤러:IDE 에 비어있음 클릭 ➡ 속성에 파란색 동그라미 클릭 ➡ 가상 광학 디스크 선택/만들기 클릭 or 바로 아까 다운 받은 우분투 다운로드 파일 클릭

🔧 정상적으로 추가되었는지 확인

🔧 시작 버튼 클릭: 가상 디스크 시작
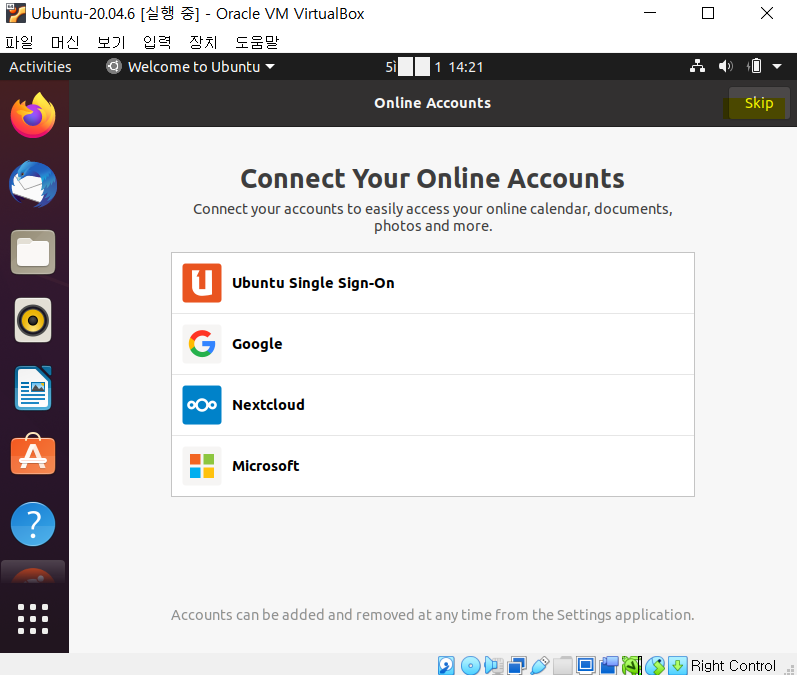
🔧 skip
👊 완료!!
📖 참고
2. Install ROS 2 on Remote PC 링크
2-1. 터미널 창 열어 ROS 다운로드
🔥 문제 발생
-
문제: 터밀널 창이 안열림
-
원인: 무인 설치(Unattended Install)를 진행하면 발생하는 현상
-
해결 방안: 우분투의
Settings➡Region & Language➡ 언어 다른걸로 변경 ➡ 로그아웃 후 다시 로그인
다음과 같이 입력
$ sudo wget https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros2_foxy.sh
$ sudo chmod 755 ./install_ros2_foxy.sh # 현재 디렉토리에 있는 install_ros2_foxy.sh 파일의 권한을 Owner는 읽기, 쓰기, 실행이 가능하고, Group과 Others는 읽기, 실행이 가능하도록 변경하는 명령어
$ sudo bash ./install_ros2_foxy.sh🔥 문제 발생
-
문제: 두번째 명령어가 동작 안함
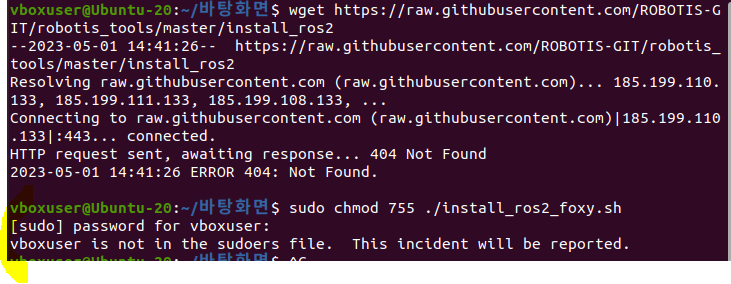
-
원인: 현재 로그인한 사용자가 sudo 명령 실행 권한이 없음
-
해결 방안: 가상머신에 로그인한 사용자에게 sudo 권한을 부여
# root 사용자로 변경 su - # 현재 사용자를 sudoers 파일에 추가 sudo visudo # 편집 파일이 열리면 root ALL=(ALL:ALL) ALL 라인 다음에 아래와 같이 현재 사용자를 추가 <username> ALL=(ALL:ALL) ALL exit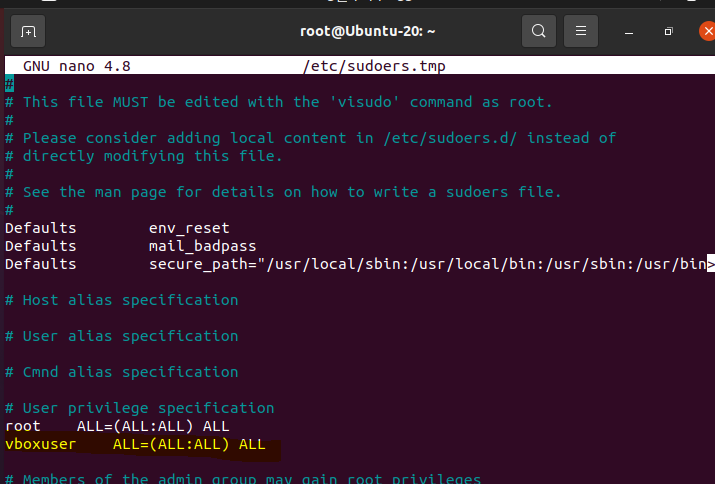
3. Install Dependent ROS 2 Packages
3-1. Install Gazebo11
sudo apt-get install ros-foxy-gazebo-*3-2. Install Cartographe
sudo apt install ros-foxy-cartographer
sudo apt install ros-foxy-cartographer-ros3-3. Install Navigation2
sudo apt install ros-foxy-navigation2
sudo apt install ros-foxy-nav2-bringup4. Install TurtleBot3 Packages
source ~/.bashrc
sudo apt install ros-foxy-dynamixel-sdk
sudo apt install ros-foxy-turtlebot3-msgs
sudo apt install ros-foxy-turtlebot35. Environment Configuration
Set the ROS environment for PC
echo 'export ROS_DOMAIN_ID=30 #TURTLEBOT3' >> ~/.bashrc
source ~/.bashrc