solvePnP
- Represent camera motion
- translation
- 카메라가 3차원 공간에서 이동한 경우, 이동량을 translation
- 3차원점 (x, y, x)에서 (x', y', z')으로 이동 --> translation은 vector = (x'-x, y'-y, z'-z)
- rotation
- 카메라 x, y, z에서 회전한 경우
- pose estimation
- solvePnP는 카메라의 이러한 pose를 추정
- 카메라 고정 --> 물체 pose 추정
- 물체 고정 --> 카메라 pose 추정
- solvePnP는 카메라의 이러한 pose를 추정
- translation
- pose estimation시 필요한 정보
- 2d coordinates of a few points
- 2차원 이미지 상의 점 (x,y)
- 3d locations of the same points
- 2차원 이미지에 대응하는 3차원 상의 점 (x,y,z)
- wordl coordinates 라고도 불림
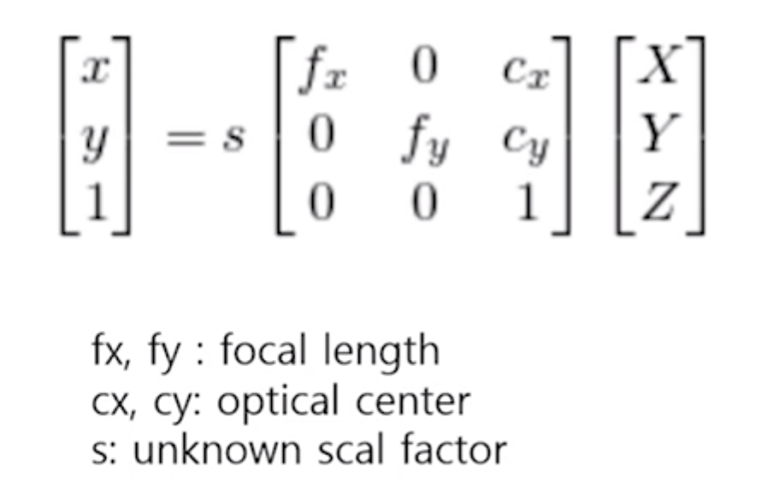
- intrinsic parameters of the camera
- 초점 거리(focal lenght of camera)
- optical center in the image
- radial distortion
- 2d coordinates of a few points
- pose estimation 표현 방법
- 카메라의 pose(rotation, translation)을 알고 있다고 가정할 때 --> world coordination의 점 p(U,V,W)를 수식을 통해 camera coordinates의 점(x,y,z)로 투영 가능
- r: rotation, t: translation
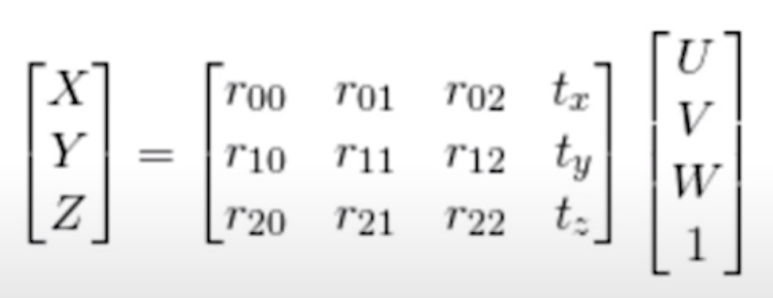
- r: rotation, t: translation
- camera coordinate로부터 image coordinates 구할 수 있음
- focal length(초점 거리): 렌즈 중심에서 이미지 센서 거리
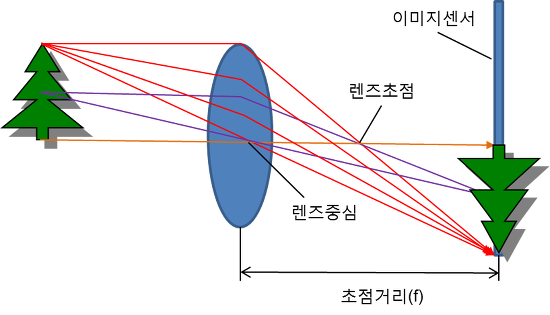
- optical center: 렌즈의 중심점
1. principal center: image plane의 센터
- focal length(초점 거리): 렌즈 중심에서 이미지 센서 거리
- 위의 두 식을 이용하여 rotation과 translation 예측 가능

2차원 좌표, world coordinate, camera coordinate, 카메라 내부 패러미터를 알면 translation과 rotation을 알 수 있음 --> 카메라 위치를 알 수 있음
- 카메라의 pose(rotation, translation)을 알고 있다고 가정할 때 --> world coordination의 점 p(U,V,W)를 수식을 통해 camera coordinates의 점(x,y,z)로 투영 가능
- orb slam에서 solvePnP 사용
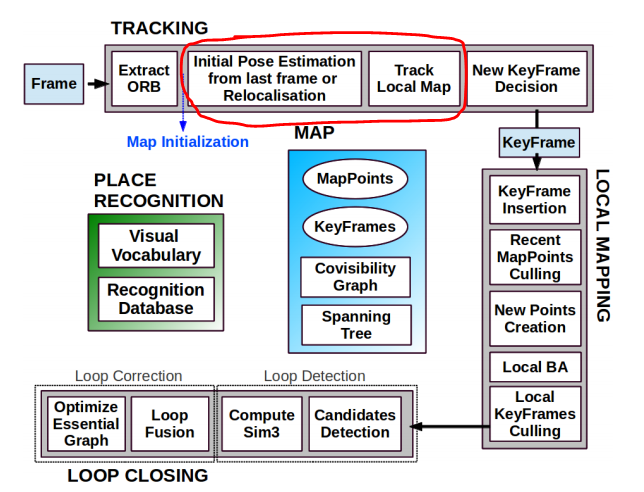
- tracking 부분에서 intial pose estimation 단계에서 카메라 위치 추정을 위해 사용
- 영상에서 추출한 ORB feature를 기반으로 카메라 위치 추정
- 기존의 map 정보(3d)와 extract orb로 얻은 특징점(2D)정보를 가지고 이동한 값을 찾음
- tracking 부분에서 intial pose estimation 단계에서 카메라 위치 추정을 위해 사용
