백준 9376←클릭
아이디어
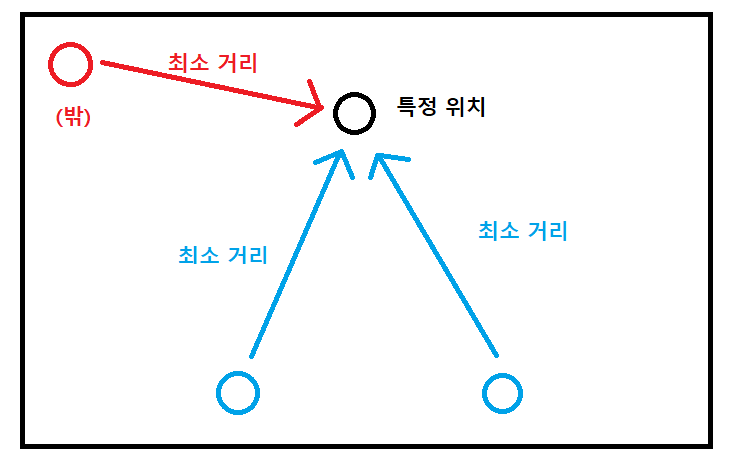
- 죄수 2명과 상근이의 위치를 기준으로
다익스트라를 적용하여 지도의 각 위치까지의 최소 거리를 모두 구한다.
- 지도의
특정 위치에서 세 최소 거리의 합은 해당 위치까지 상근이와 죄수 2명이최소 거리로 이동했을 때 드는 비용이다.
특정 위치에 문이 있을 경우 2를 빼주는데 이는 단순이 합을 구하게 되면 해당 위치에서 문을 3번 열기 때문이다.
- 가장 비용이 적게 드는 값을 찾는다.
변수 설정
sx1,sy1,sx2,sy2: 죄수의 위치VertexInfo: 노드의좌표와 시작 지점에서 해당 위치까지 가는데 드는비용을 저장하는 구조체dij[i][j][k]:다익스트라 거리 저장 3차원 배열,i는 사람 정보,j,k는 좌표 정보pq: 다익스트라 구현을 위한 우선순위 큐
예시
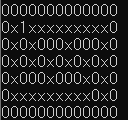
문제의 2번째 예시를 사용해보자.
상근이의 위치를 밖으로 설정하기 위해 맵 주변을 .으로 감싸주고 상근이의 위치를 (0,0)으로 설정한다.
-
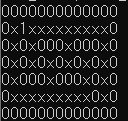
상근이 기준 다익스트라 결과
-
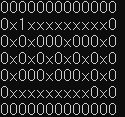
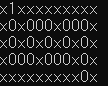
죄수 1 기준 다익스트라 결과
-
죄수 2 기준 다익스트라 결과
cost 합:
고로 최소값은 0이다!
코드
#define _CRT_SECURE_NO_WARNINGS
#define INF 2100000000
#include<iostream>
#include<algorithm>
#include<queue>
using namespace std;
char map[102][102];
int dx[4] = { -1,1,0,0 };
int dy[4] = { 0,0,-1,1 };
int sx1, sy1, sx2, sy2;
int TC, h, w;
int min_cost;
bool print = false;
int dij[3][102][102];
bool visited[3][102][102];
void setting();
void solution();
void dijkstra(int x, int y, int p);
void cal_cost();
struct VertexInfo {
int x;
int y;
int cost;
bool operator <(const VertexInfo& v) const{
return cost > v.cost;
}
};
int main() {
//freopen("input/9376_input.txt", "r", stdin);
cin >> TC;
while (TC--) {
setting();
solution();
}
return 0;
}
void setting() {
/* 초기화 */
sx1 = -1; sx2 = -1; sy1 = -1; sy2 = -1;
min_cost = 987654321;
cin >> h >> w;
if (print) printf("h: %d, w: %d\n", h, w);
for (int i = 0; i < 3; i++) {
for (int j = 0; j <= h + 1; j++) {
for (int k = 0; k <= w + 1; k++) {
dij[i][j][k] = INF;
visited[i][j][k] = false;
}
}
}
for (int i = 0; i <= h + 1; i++) {
for (int j = 0; j <= w + 1; j++) {
if (i == 0 || i == h + 1 || j == 0 || j == w + 1) {
map[i][j] = '.';
}
else {
cin >> map[i][j];
if (map[i][j] == '$') {
map[i][j] = '.';
if (sx1 == -1) {
sx1 = i;
sy1 = j;
}
else {
sx2 = i;
sy2 = j;
}
}
}
}
}
if (print) {
for (int i = 0; i <= h + 1; i++) {
for (int j = 0; j <= w + 1; j++) {
cout << map[i][j];
}
cout << endl;
}
}
}
void solution() {
dijkstra(0, 0, 0);
dijkstra(sx1, sy1, 1);
dijkstra(sx2, sy2, 2);
cal_cost();
cout << min_cost << endl;
}
void dijkstra(int x, int y, int p) {
if (print)printf("dijkstra(%d, %d, %d)\n", x, y, p);
priority_queue<VertexInfo> pq; //오름차순으로 해야함
visited[p][x][y] = true;
pq.push({ x, y, 0 });
while (!pq.empty()) {
int cur_x = pq.top().x;
int cur_y = pq.top().y;
int cur_c = pq.top().cost;
pq.pop();
if (print)printf("cur_x: %d, cur_y: %d, cur_c: %d\n", cur_x, cur_y, cur_c);
if (dij[p][cur_x][cur_y] <= cur_c) continue;
dij[p][cur_x][cur_y] = cur_c;
for (int i = 0; i < 4; i++) {
int nx = cur_x + dx[i];
int ny = cur_y + dy[i];
if (nx < 0 || nx > h + 1 || ny < 0 || ny > w + 1) continue;
else {
if (!visited[p][nx][ny]) { //처음 방문하는 곳 인 경우
if (map[nx][ny] == '.') {
if (print)printf("pushed: %d, %d, %d\n", nx, ny, cur_c);
pq.push({ nx, ny, cur_c });
visited[p][nx][ny] = true;
}
else if (map[nx][ny] == '#') {
if (print)printf("pushed: %d, %d, %d\n", nx, ny, cur_c + 1);
pq.push({ nx, ny, cur_c + 1});
visited[p][nx][ny] = true;
}
}
else { //이미 방문한 적 있는 경우
if (map[nx][ny] == '.' && dij[p][nx][ny] > cur_c) {
if (print)printf("(재방문)pushed: %d, %d, %d\n", nx, ny, cur_c);
pq.push({ nx, ny, cur_c });
}
else if (map[nx][ny] == '#' && dij[p][nx][ny] > cur_c + 1) {
if (print)printf("(재방문)pushed: %d, %d, %d\n", nx, ny, cur_c + 1);
pq.push({ nx, ny, cur_c + 1 });
}
}
}
}
}
if (print) {
for (int i = 0; i <= h + 1; i++) {
for (int j = 0; j <= w + 1; j++) {
if (dij[p][i][j] == INF) cout << "x";
else cout << dij[p][i][j];
}
cout << endl;
}
}
}
void cal_cost() {
if (print) cout << "cal_cost" << endl;
for (int i = 1; i <= h; i++) {
for (int j = 1; j <= w; j++) {
int c = 0;
for (int k = 0; k < 3; k++) {
if (dij[k][i][j] != INF) c += dij[k][i][j]; //오버플로우 조심
else c = INF;
}
if (map[i][j] == '#') c -= 2;
min_cost = min(min_cost, c);
if (print) {
if (c >= INF) cout << "x";
else cout << c;
}
}
if(print) cout << endl;
}
}
개발자로서 성장하는 데 큰 도움이 된 글이었습니다. 감사합니다.